-

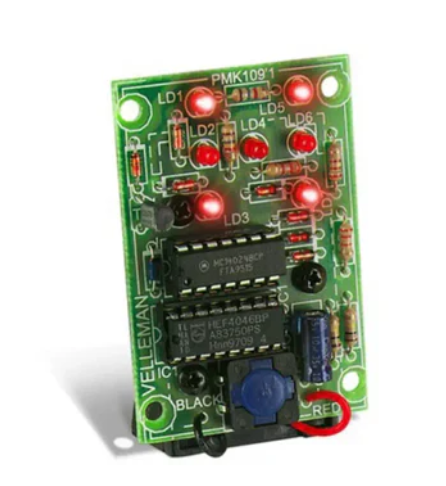
Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




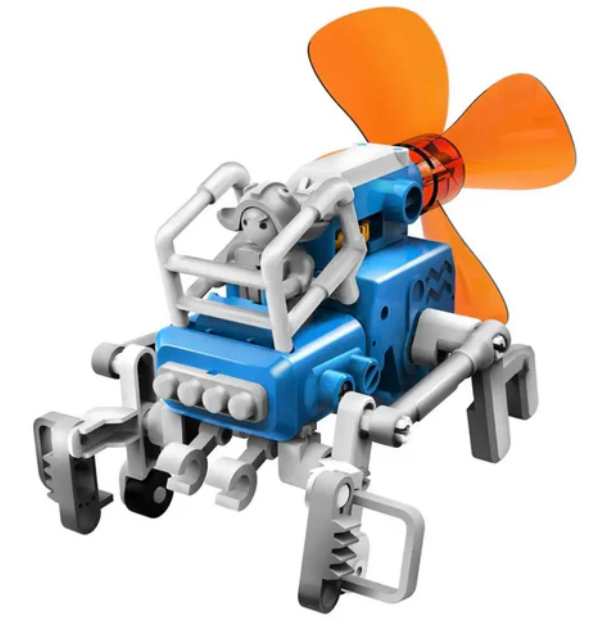
Includes everything needed for easy snap on/screw on assembly
Chain assembly track
Can rotate and grab onto sloping or protruding surfaces
Some simple wiring is needed to complete the assembly
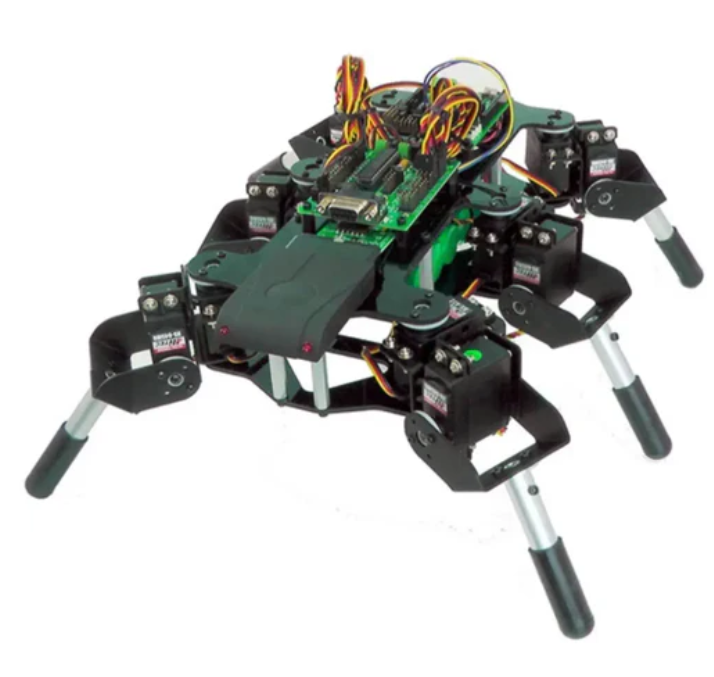
The arm crawling robot kit is equipped with four rotating tracks: one on each side of the body and one on each of the other two arms. The arm itself can also rotate, grabbing onto slopes or raised surfaces to pull the model, allowing it to climb and descend up to 45 millimeters.
Arm Crawling Robot Kit
features:
The switch has been pre installed on the motor
Equipped with rear support to ensure that the arm crawler does not tip over when climbing higher obstacles
Requires one AA battery (not included)
Can be used in combination with the 70097 dual motor gearbox and the 70102 dual channel remote control box
Arm Crawling Robot Kit
Related products