

Hiwonder ArmPi Pro Raspberry Pi ROS Robotic Arm Development Kit with 4WD Mecanum Wheel Chassis Open Source Robotic Car
(0
reviews)
Sold by:
规划局
规划局
Price:
$599.99
/0.58
Refund:
Share:
Top Selling Products
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




Supported by Raspberry Pi and based on Robot Operating System (ROS)
Equipped with high-definition wide-angle camera
Support first person perspective (FPV) image transmission
Equipped with a powerful vehicle chassis that can move in all directions
Open source and rich tutorial materials
Hiwonder Armpi Pro Raspberry Pi ROS Robot Arm Development Kit, with open-source 4WD Mecanum wheel chassis robot car, developed based on Armpi FPV Vision robot arm, adding omnidirectional Mecanum wheel car, which can achieve movement, picking, target tracking, and intelligent transportation. The detachable Mecanum wheel drive allows it to flexibly switch between two models: desktop robotic arm and mobile robotic arm. Armpi Pro has rich tutorials and open-source Python code, making it the perfect platform for learning ROS, robotics technology, and robot vision. It can shorten project development cycles and allow you to fully experience AI.
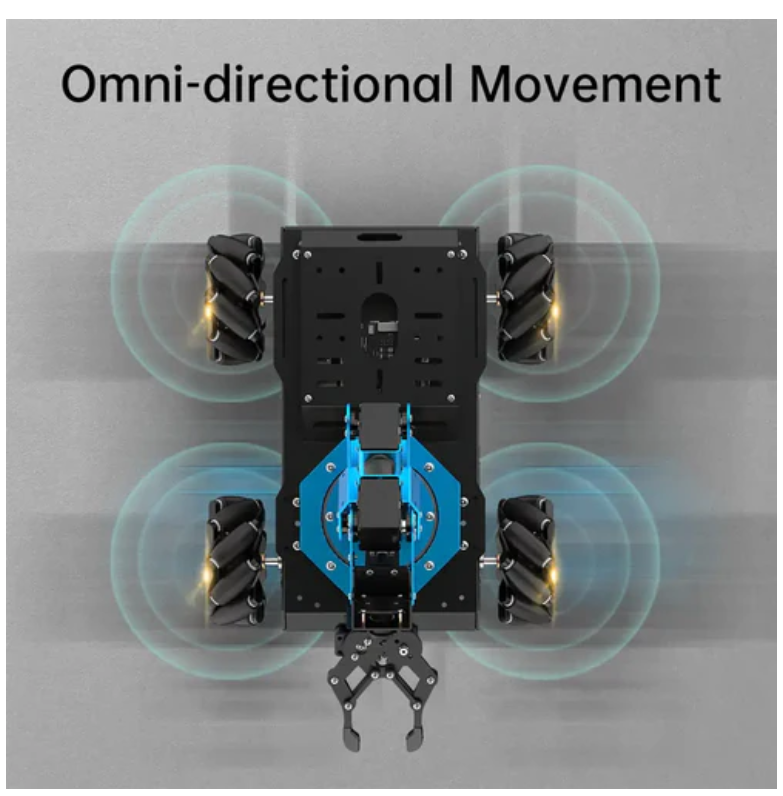
1. Omnidirectional movement and first person perspective
1) 360 degree all-round motion
The Armpi Pro is equipped with four high-performance encoder reduction motors and four omnidirectional Mecanum wheels, allowing for 360 degree motion. Multiple motion modes (forward, horizontal, diagonal, and rotation) and excellent performance make it suitable for challenging and complex routes.
2) Object transportation and first person perspective
The Armpi Pro is equipped with an Armpi FPV Vision robotic arm, which can easily pick up and transport targets. When used in conjunction with the high-definition camera at the end of the robotic arm, it can provide a first person perspective.
2. AI visual recognition and target tracking
Armpi Pro uses OpenCV as an image processing library and utilizes FPV cameras to recognize and locate target blocks, enabling AI games such as color classification, target tracking, and line tracking.
1) Color tracking
Through visual positioning of the target object and inverse kinematics algorithm of the robotic arm, accurate aiming and tracking of the target object can be achieved.
2) Color classification
With rich tutorials and open-source Python code, robotic arms can perform color recognition, picking, and classification.
3) Following the line
ROI regions were extracted using OpenCV, and after noise reduction and image binarization, direction calibration was performed using PID algorithm to achieve line patrol.
3. APP control and FPV image transmission
Android and iOS applications can be used for remote control of robots. Through this application, you can control robots in real-time and switch between various AI games with just one click.
1) First person perspective and high-definition transmission images
Armpi Pro supports WLAN and WIFI direct connection modes. After WiFi connection, the first person perspective will be transmitted to the APP interface, providing a stimulating and realistic robot control experience.
2) Real time remote control and picking and transportation
Use this application to easily move, select, and transport Armpi Pro.
3) Quickly experience AI games
Easily and quickly switch game modes to experience various AI games.
4. Hardware features
1) Hard aluminum alloy
The hard aluminum alloy can protect the core control board from breakage and impact, and can withstand larger loads.
2) Encoder motor and encoder motor driver
The large reduction ratio coding motor can accurately calculate wheel speed and travel distance, and the four channel coding motor driver makes motor control simpler.
3) High definition 120 degree wide-angle camera
The Armpi Pro is equipped with a 120 degree wide-angle camera, which can achieve 180 degree surround view and 180 degree up and down observation. When combined with the Mecanum chassis car, its visual range can reach 360 degrees.
4) High performance serial bus servo
Can provide voltage and position feedback, with greater force, built-in anti blocking algorithm, and longer service life.
5) 12000mAh high-capacity lithium battery
Built in 12000mAh high-capacity lithium battery provides powerful power for robots and extends their working life
Related products



$379.99
Hiwonder Tankbot tracked robot car with robotic arm, suitable for STM32 programming
Club Point:
0




© Temu-2023