
Hiwonder JetHexa ROS hexapod robot kit powered by Jetson Nano, equipped with LiDAR depth camera, SLAM mapping and navigation (Advanced Kit)
(0
reviews)
Sold by:
规划局
规划局
Price:
$0.00
/0.5
Refund:
Share:
Top Selling Products
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




- Supported by NVIDIA Jetson Nano and based on ROS
- Support depth cameras and LiDAR for surveying and navigation
- Upgraded inverse kinematics algorithm
- Capable of deep learning and model training
- Note: This is the JetHexa Advanced Kit, which comes in two versions. The JetHexa Standard Kit is equipped with a monocular high-definition camera, while the JetHexa Advanced Kit is equipped with a LiDAR and depth camera.
- JetHexa tutorial link: https://drive.google.com/drive/folders/1YY5vy4sfUiNDoEkvPir-d634UZdzCQuT?usp=sharing
- Reminder: The map and navigation functions are only available for the JetHexa premium package.
- This link is applicable to JetHexa Advanced Kit: https://www.robotshop.com/en/hiwonder-jethexa-ros-hexapod-robot-kit-powered-by-jetson-nano-with-lidar-depth-camera-support-slam-mapping-navigation-advanced-kit.html
- JetHexa is an open-source hexapod robot based on the Robot Operating System (ROS), equipped with high-performance hardware such as NVIDIA Jetson Nano, intelligent serial bus servo, LiDAR, high-definition camera/3D depth camera, etc. It can achieve robot motion control, mapping navigation, obstacle avoidance, custom cruising, human feature recognition, and motion sensing interaction.
- JetHexa adopts a novel inverse kinematics algorithm, supports tripod and ripple gait, and has highly configurable body posture, height, and speed, which will bring users the ultimate user experience.
- JetHexa not only provides users with an advanced platform for learning and verifying the movements of hexapod robots, but also offers a solution for ROS development. To help users embark on a new journey in the world of ROS hexapod robots, a wealth of ROS and robot learning materials and tutorials are provided.
- Jetson Nano Control System
- NVIDIA Jetson Nano is capable of running mainstream deep learning frameworks such as TensorFlow, PyTorch, Coffee/Caffe2, Keras, MXNet, etc., providing powerful computing power for massive AI projects. JetHexa is equipped with Jetson Nano, which can achieve comprehensive functions such as image recognition, object detection and localization, pose estimation, semantic segmentation, and intelligent analysis.
- 2. Monocular camera (with 2DOF gimbal)
- The monocular camera can rotate up, down, left, right, and achieve color tracking, autonomous driving, and more.
- 3. 3D depth camera
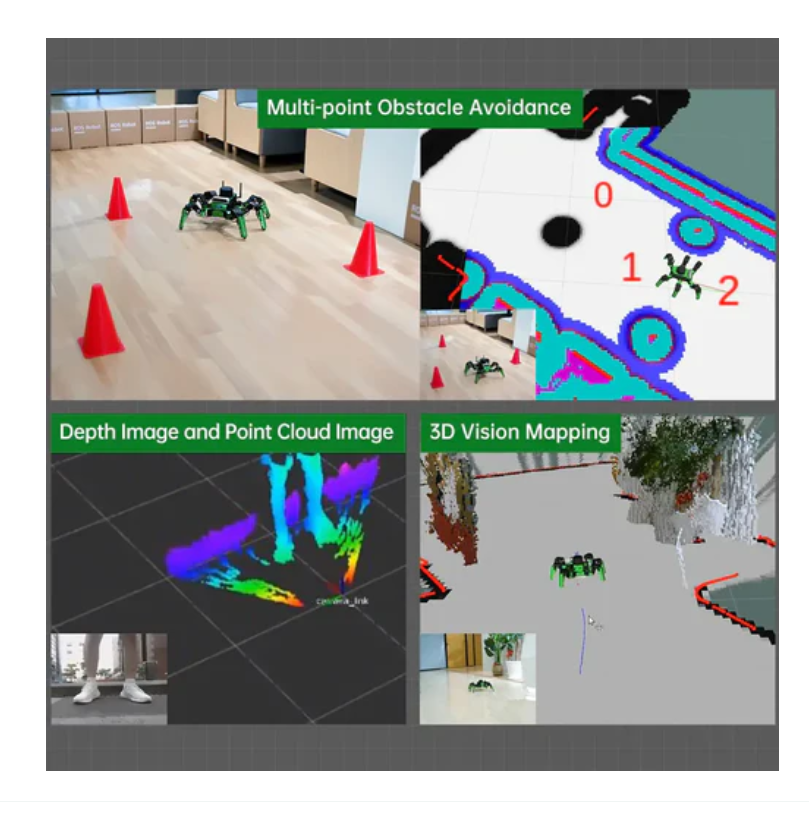
- Depth cameras can process depth map data and achieve 3D visual mapping and navigation.
- 4. ROS highlights
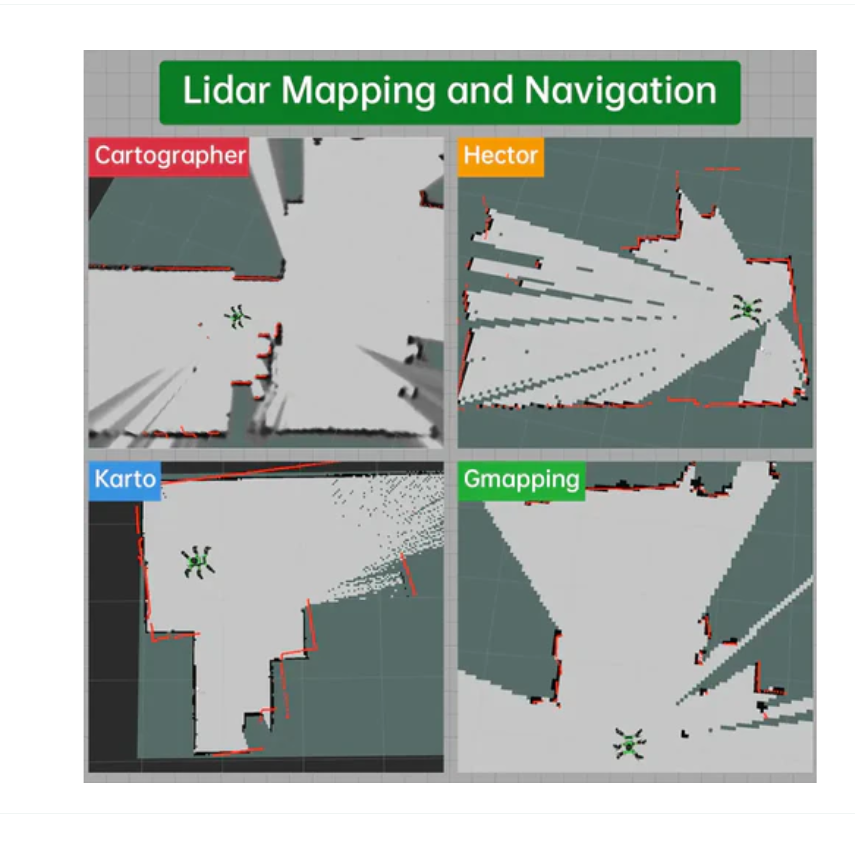
- 1) 2D LiDAR mapping, navigation, and obstacle avoidance:
- JetHexa is equipped with high-performance EAI G4 LiDAR, which supports the use of various algorithms such as Cartographer, Hector, Karto, and Gmapping for mapping, path planning, fixed-point navigation, and navigation obstacle avoidance.
- 2) RTAB-VSLAM 3D Visual Mapping and Navigation:
- JetHexa supports both pure RTAB vision and fusion of vision and LiDAR for 3D color mapping, enabling navigation, obstacle avoidance, and global repositioning in 3D maps.
- 3) Multi point navigation and obstacle avoidance:
- Lidar can detect the surrounding environment in real-time, allowing JetHexa to avoid obstacles during multi-point navigation.
- 4) Depth image data, point cloud images:
- Through the corresponding API, JetHexa can obtain depth images, color images, and point cloud images of the camera.
- 5) KCF target tracking:
- Based on the KCF filtering algorithm, robots can track selected targets.
- 6) Depth camera obstacle recognition:
- With the help of a depth camera, it can detect obstacles ahead and pass through them.
- 7) Custom path search:
- Users can customize the path and command the robot to walk along the designed path.
- 8) Lidar tracking:
- Lidar enables robots to track targets by scanning moving objects ahead.
- 9) Lidar Guard:
- Lidar plays a role in guarding the surrounding environment and issuing alerts when intruders are detected.
- 10) Color recognition and tracking:
- This robot is proficient in recognizing and tracking colors, and can perform different actions based on colors.
- 11) Group control:
- Only one wireless controller is needed to control a group of JetHexa to perform actions uniformly and simultaneously.
- 12) Intelligent formation:
- Can control a group of robots to patrol in different formations.
- 13) Crossing the Canyon:
- When the LiDAR scans the canyon ahead, the robot will adjust its posture and direction to pass through the canyon.
- 14) Automatic route tracking:
- Robots can recognize user specified color lines and walk along them.
- 15) Tag recognition and tracking:
- JetHexat excels at simultaneously identifying and locating multiple AR tags.
- 16) Pose detection:
- Built in IMU sensor, capable of real-time detection of body posture.
- 5. Upgraded inverse kinematics algorithm (tripod gait/ripple gait):
- One click gait switching:
- JetHexa supports switching between tripod gait and ripple gait at will.
- 1) Fixed speed and height 'moon walk':
- Through inverse kinematics algorithms, JetHexa can maintain stability during SLAM mapping and perform lunar walks at a constant speed.
- 2) Pitch and roll angle adjustment:
- The highly configurable body posture, center of gravity, pitch angle, and roll angle enable hexapod robots to overcome various complex terrains.
- 3) Direction, speed, height, and stride adjustment:
- JetHexa can turn and change lanes while moving, and supports seamless adjustment of linear velocity, angular velocity, attitude, height, and stride.
- 4) Body self balance:
- The built-in IMU sensor is responsible for real-time detection of body posture, thereby arranging the robot to adjust joints and maintain body balance.
- 6. Deep learning and model training assist artificial intelligence creativity
- JetHexa uses neural networks such as GoogLeNet, Yolo, and mtcnn to master deep learning training models. By loading various models, it can quickly identify targets and achieve complex AI projects such as garbage classification, mask recognition, and emotion recognition.
- 1) Mask recognition:
- With its powerful computing power, JetHexa's AI capabilities can be extended through deep learning.
- 2) Garbage classification:
- Quickly identify different discarded cards and place them in the corresponding areas according to their categories.
- 3) Emotion recognition:
- JetHexa can accurately recognize facial features and capture every subtle difference in facial expressions.
- 6. MediaPipe development, AI interaction upgrade
- JetHexa is based on the MediaPipe framework and can perform human tracking, hand detection, pose detection, overall detection, face detection, 3D detection, and more.
- 1) Fingertip trajectory control
- 2) Human posture control
- 3) Gesture recognition
- 4) 3D face detection
- 7. Pavilion simulation
- JetHexa adopts the ROS framework and supports Gazebo simulation. Gazebo provides you with a new way to control JetHexa and validate the algorithm in a simulated environment, reducing experimental requirements and improving efficiency.
- 1) Vehicle control simulation:
- Validate the kinematic algorithm through simulation to avoid damage to the robot caused by algorithm errors.
- 2) Visual data:
- Provide visual data, observe the trajectory of the robot's end effector and center of gravity, and optimize algorithms.
- 8. Diverse control methods:
- 1)WonderAi APP
- 2) Map navigation application (Android only)
- 3) PC software
- 4) Wireless controller
- -There are various control methods:
- -WonderAi APP
- -Map navigation application (Android only)
- -PC software
- -Wireless controller
Related products









$149.99
Ainova Vision Robotic Car with Wondercam, Graphic Scratch and Python Programming
Club Point:
0
© Temu-2023