Hiwonder TurboPi Raspberry Pi Omni Mecanum Wheel Robot Car Kit with Camera, Open Source Python for Beginners (RPi 4B Not Included)
规划局
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




Utilizing high-definition cameras and OpenCV library for FPV perspective and image processing
Use 4-channel line followers or cameras for path tracking and autonomous driving
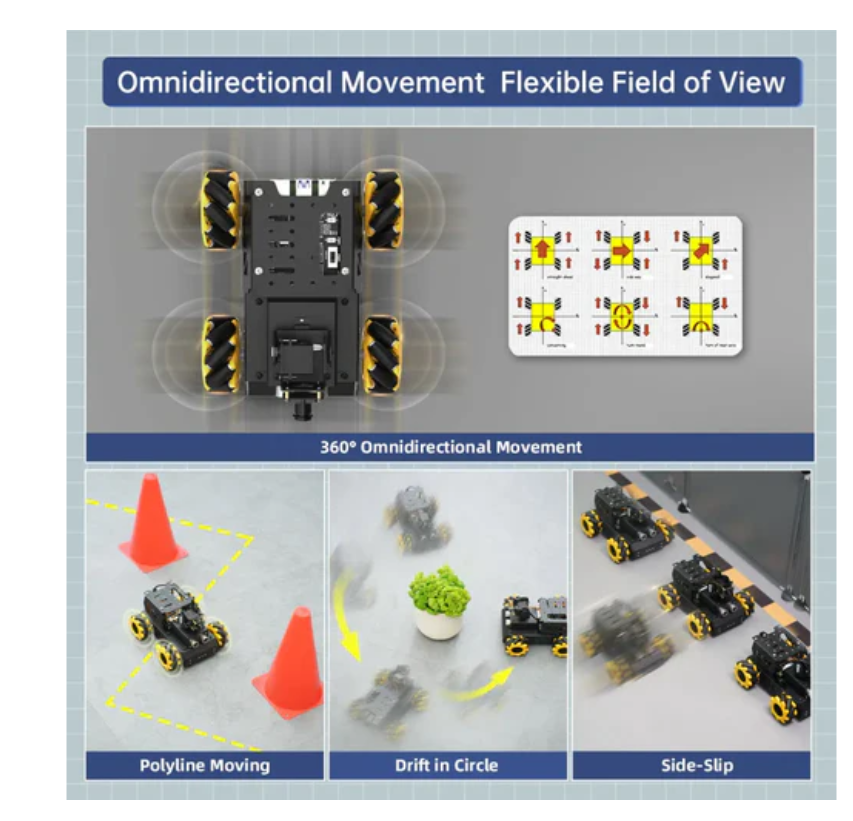
Advanced omnidirectional Mecanum wheels enable flexible 360 ° movement
Provide ultimate control over its movement, grip, and transportation through dedicated applications
Supported by Raspberry Pi 4B and Python (note: does not include Raspberry Pi 4B board, this kit only includes Raspberry Pi 4B expansion board)
product description
TurboPi is an intelligent visual robot car based on Raspberry Pi. It is based on the Mecanum wheel chassis, equipped with high-performance gimbal servo, high-definition camera, and 4-channel line patrol, and can be programmed using Python. With its powerful features, TurboPi unlocks various AI applications.
1) 360 ° all-round movement
The TurboPi is equipped with four universal Mecanum wheels, which can rotate 360 °. It has multiple motion modes (forward, horizontal, diagonal, and rotary) and excellent performance, allowing it to challenge various complex routes.
2) 2DOF gimbal, achieving a 360 ° viewing angle
Equipped with two anti obstruction servers, the gimbal can rotate vertically by 130 ° and horizontally by 180 °, achieving a 360 ° camera field of view.
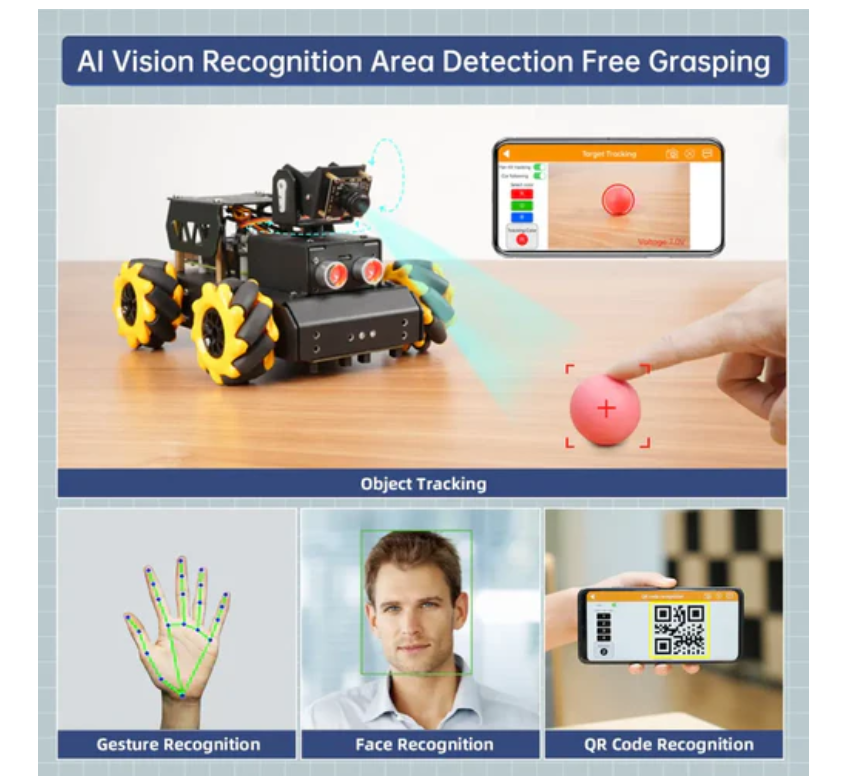
1. AI visual recognition target tracking
TurboPi uses OpenCV as an image processing library to recognize target objects and complete AI games such as face tracking, color tracking, QR code recognition, gesture recognition, object recognition, and line tracking.
1) First person perspective high-definition transmission image
TurboPi supports LAN and WiFi direct connection. After WiFi connection, the first person perspective will be transmitted to the APP interface, bringing you a more exciting and realistic robot control experience!
2) Color recognition and tracking
TurboPi uses OpenCV to track specific colors. After selecting a color on the app, it emits light of the corresponding color and follows the movement of objects of that color.
3) Target tracking, different tracking modes
TurboPi uses OpenCV to track targets within the field of view, supporting two tracking modes that allow the gimbal to follow the target's movement or move together with the vehicle.
4) Facial detection and tracking
TurboPi can track faces within its field of view and move accordingly.
5) Gesture recognition, human-computer interaction
TurboPi, in conjunction with OpenCV, counts fingers and interacts accordingly based on the number of fingers, such as honking, twisting fingers, changing the color of lights, etc.
6) QR code control
TurboPi can recognize and read QR codes and perform related operations.
2. Automatic driving is achieved by combining a 4-channel line patrol device with a camera. The line patrol device is responsible for the line patrol function, while the camera is used to recognize traffic lights and road signs.
1) Autonomous driving
2) Traffic signal recognition
3) Roadside recognition
4) Use a 4-channel line patrol device for line inspection
TurboPi uses four infrared probes on a 4-channel line detector to detect and track lines.
5) Following the gaze
To achieve line tracking, OpenCV is first used to extract ROI regions, then noise is removed to locate lines on binary images, and finally PID algorithm is used for direction calibration.
3. Obstacle avoidance
TurboPi includes a glowing ultrasonic sensor that not only detects and avoids obstacles, but also dynamically changes its own light.
4. Hardware features
1) Hard aluminum alloy chassis
Protect the core control board from breakage, impact, and withstand greater loads!
2) High performance gimbal servo
The 2DOF gimbal is equipped with a miniature anti blocking servo, which has higher accuracy and longer service life.
3) High definition wide-angle camera
The TurboPi is equipped with a high-definition wide-angle camera, which can observe 180 degrees in front, back, left, and right directions. When combined with the Mecanum chassis car, the visual range can reach 360 degrees.
4) 4-channel patrol device
The 4-channel line detector with IIC interface enables TurboPi to detect black lines without occupying Raspberry Pi CPU.
5) Supported by Raspberry Pi
TurboPi is supported by Raspberry Pi 5 or 4B controllers, allowing you to work on motion control, machine vision, and OpenCV projects.
6) Easy to build
The setup of TurboPi is very simple, just follow the instructions, and you can enjoy the fun of building robots.
7) APP control
The WonderPi app supports both Android and iOS, allowing for easy and quick switching of game modes and experiencing various AI games.
8) Infinite creativity
TurboPi can expand various electronic modules and LEGO bricks, opening up a variety of fun robot games.
Related products



Hiwonder Tankbot tracked robot car with robotic arm, suitable for STM32 programming