Hexapod Robot Kit for Jetson Nano 18DOF HD Camera Big Spider Robot AI Vision Recognition Python Programmable Remote Control (Includes Jetson Nano)
(0
reviews)
Sold by:
规划局
规划局
Price:
$799.00
/0.4
Refund:
Share:
Top Selling Products
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




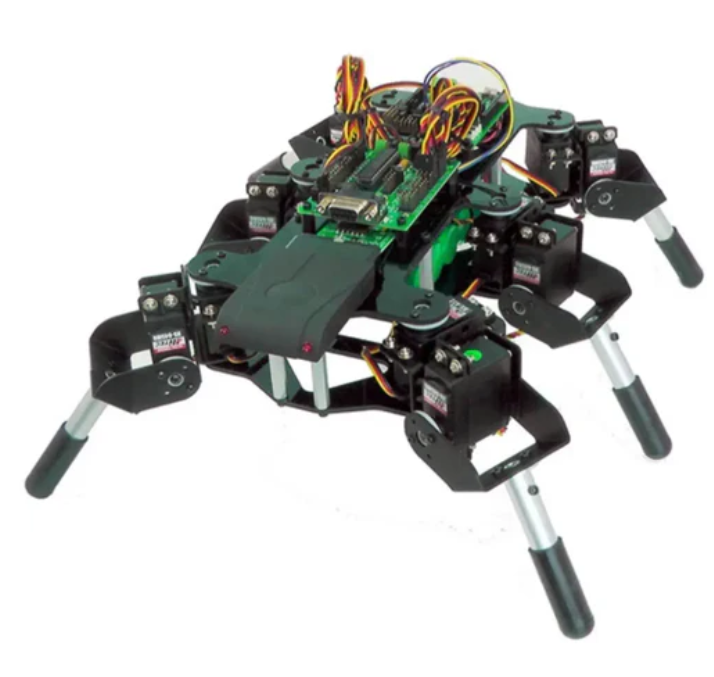
- The hexapod robot is a multifunctional spider inspired robot based on Jetson nano.
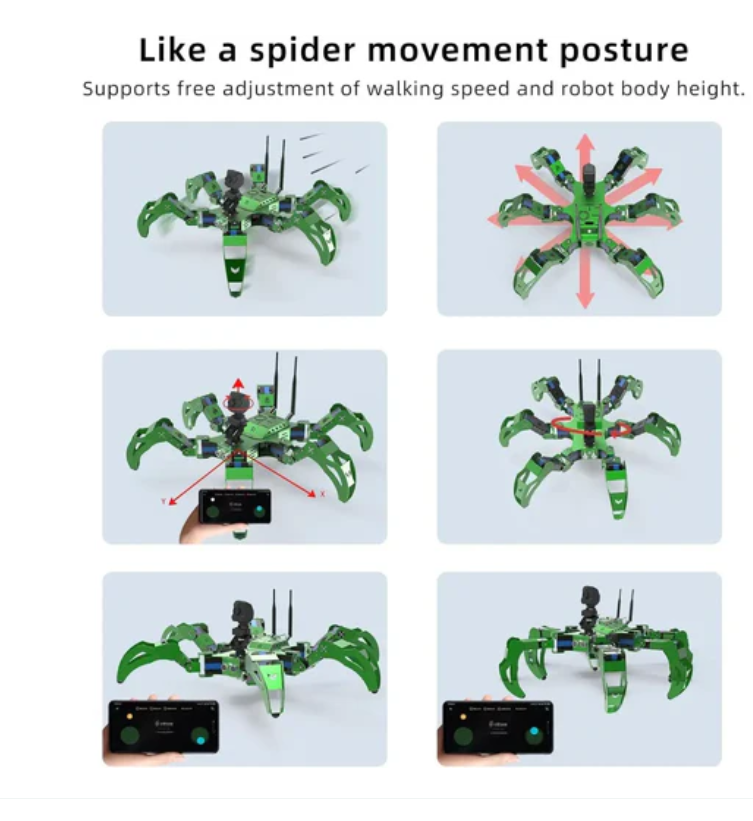
- Through inverse kinematics algorithms, 18 biomimetic actions can be achieved, including 12 sets of interesting actions such as welcoming, surrendering, and rejecting
- Python/C++is the main programming language. For beginners, this will be a challenging learning experience, and it is recommended that those with programming experience find it easier to master.
- The hexapod robot is equipped with a 2DOF camera gimbal, which can achieve real-time transmission of high-definition videos and first person perspective through WiFi on the Raspberry Pi.
- Hexapod robots can be wirelessly controlled through apps (Android/iOS), PCs, and remote controllers, and can be used for teaching experiments, project research, competitions, and more.
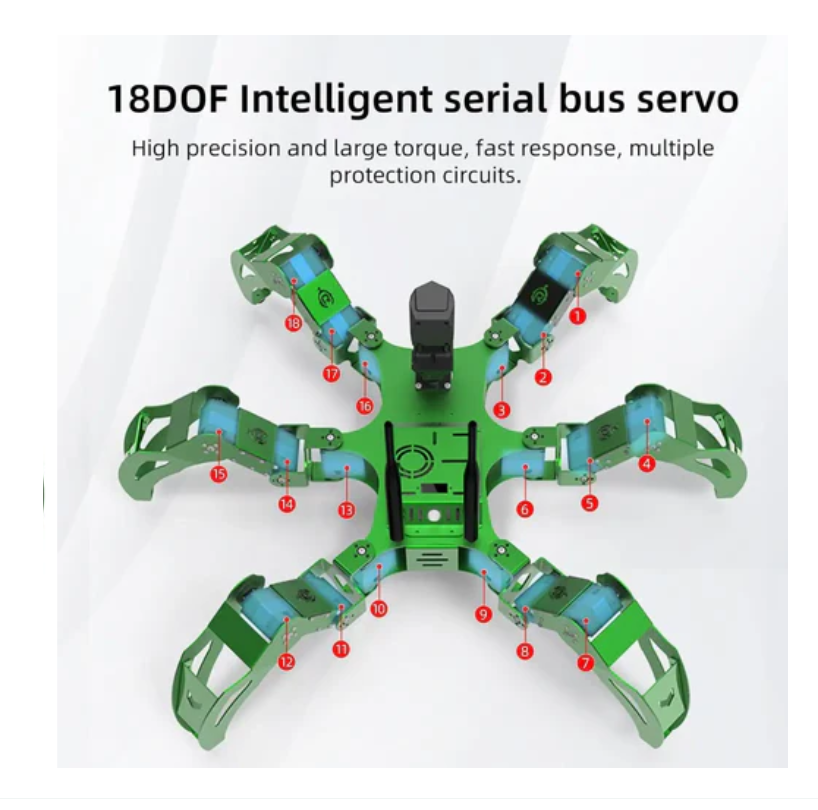
- The XR Hexapod J1 robot is a multifunctional spider inspired robot based on Jetson nano. It is made of aluminum alloy and contains 18 metal servos, making it more sturdy and durable than other acrylic hexapod robots. Through inverse kinematics algorithm, 18 biomimetic actions can be achieved, including 12 sets of fun actions such as welcoming, surrendering, and rejecting. With Jetson Nano as the main controller and programming, various AI functions such as color recognition, tracking, face tracking, QR code recognition, and line patrol can be achieved.
Related products









$149.99
Ainova Vision Robotic Car with Wondercam, Graphic Scratch and Python Programming
Club Point:
0
© Temu-2023