-

Unitree A1
$1,653.60 -
Youbionic x2 humanoid robot
$25,041.34 -
Youbionic Torso Pro with Full Arm Pro
$14,127.78 -
YouBionic X3 humanoid robot
$17,577.89 -
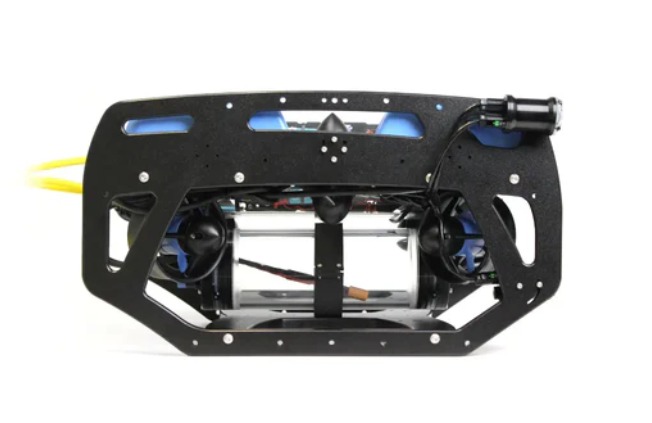
BlueROV2 (Acrylic - 100m)
$701,894.00





Leo Rover v1.8 Development Kit (Unassembled)
Equipped with 4WD outdoor robot kit
Open source and built on Raspberry Pi
Design reliable, waterproof, and expandable
Payload: Approximately 5 kilograms
Featured video streaming and driving UI
The Leo Rover v1.8 development kit is equipped with an outdoor robot kit, designed to be reliable, waterproof, and expandable.
It uses four hub DC motors, is equipped with 73.2:1 planetary gearbox and 12 CPR encoder, and is driven by four 130 mm diameter wheels and rubber tires with foam inserts (non pneumatic).
Leo Rover v1.8 Development Kit - Click to enlarge
During approximately 4 hours of normal driving, the estimated maximum obstacle size is 70 millimeters. In real-time video streaming, you can connect to Leo Rover up to 100 meters away. Its camera has a resolution of 5 MPx and uses a fisheye lens with a 160 degree field of view.
Leo Rover v1.8 Development Kit - Click to enlarge
By default, Leo Rover can be remotely controlled through video streaming and a readily available UI. It is not autonomous, but it is ready to be autonomous. This software is based on Ubuntu 20.04 and the Robot Operating System (ROS), which is known for its ease of implementing autonomous and semi autonomous functions.
The simplest method is to add a LiDAR or stereo vision camera to enhance Rover's autonomous navigation capabilities, and then build your features on top of that. The Rover itself comes with a front facing camera and 4 wheel encoders, so it provides out of the box video streaming and basic odometer.
Leo Rover v1.8 Development Kit - Click to enlarge
Please note: Due to the manufacturer's continuous efforts to improve design, the appearance and behavior of the Rover you receive may differ slightly from what is seen in the video and demonstration.
Related products



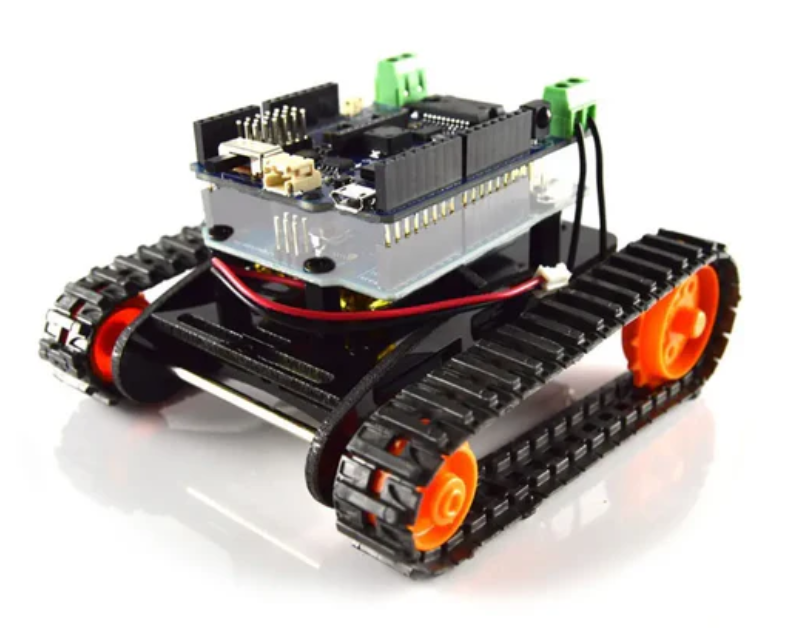
Hiwonder Tankbot tracked robot car with robotic arm, suitable for STM32 programming