


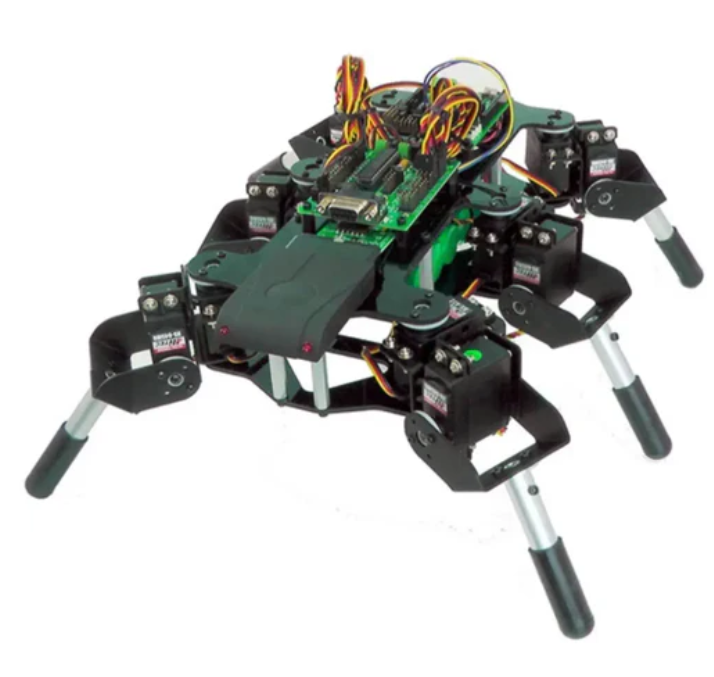
Lynxmotion A-Pod Hexapod Robot Kit (Hardware Only)
(0
reviews)
Sold by:
举行活动
举行活动
Price:
$392.09
/0.2
Refund:
Share:
Top Selling Products
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




Related products









$149.99
Ainova Vision Robotic Car with Wondercam, Graphic Scratch and Python Programming
Club Point:
0
© Temu-2023