Lynxmotion - A4WD3 Rugged Mecanum Rover Autonomous Driving Kit
规划局
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




Lynxmotion - A4WD3 rugged Mecanum rover autonomous driving kit
Mobile exploration vehicle driven by McNam and controlled by microcontroller
Adopting waterproof and dustproof sealing components
The propulsion system uses four planetary gear motors and a 152mm Mecanum wheel
Motor controller, battery pack, charger, and BotBoarduino microcontroller
Assembly is required
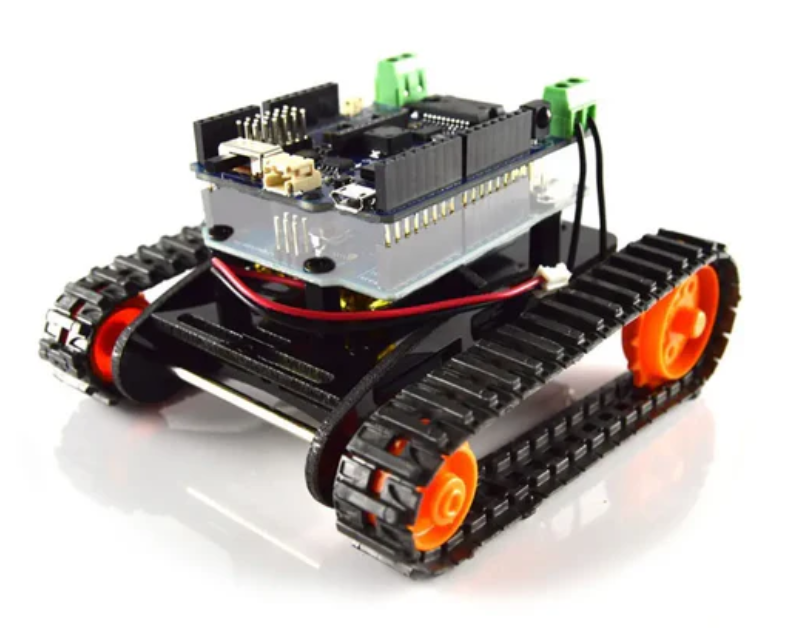
Lynxmotion A4WD3 Rugged Mecanum Rover is a universal mobile robot platform. This framework has three configurations: 4WD; Mecanum & Tracked, The variants of each platform include versions without electronic devices (so designers can integrate their own components); RC version and microcontroller based version, used for autonomous or semi autonomous development.
Lynxmotion - A4WD3 Mecanum View 01
This variant includes a complete set of four Mecanum wheels with a diameter of 152 millimeters (two on the left and two on the right), as well as all electronic devices required to control the robot using the Arduino compatible microcontroller BotBoarduino. The Mecanum wheel provides unparalleled motion on a flat surface, allowing not only the full range of motion provided by 4WD, but also left-right movement and more. These Mecanum wheels are designed for flat surfaces.
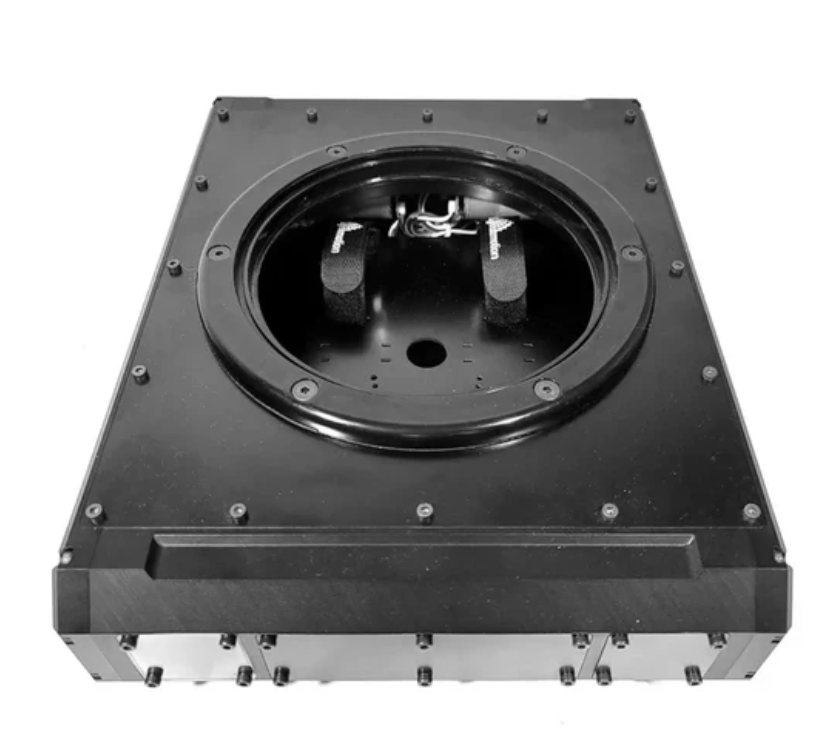
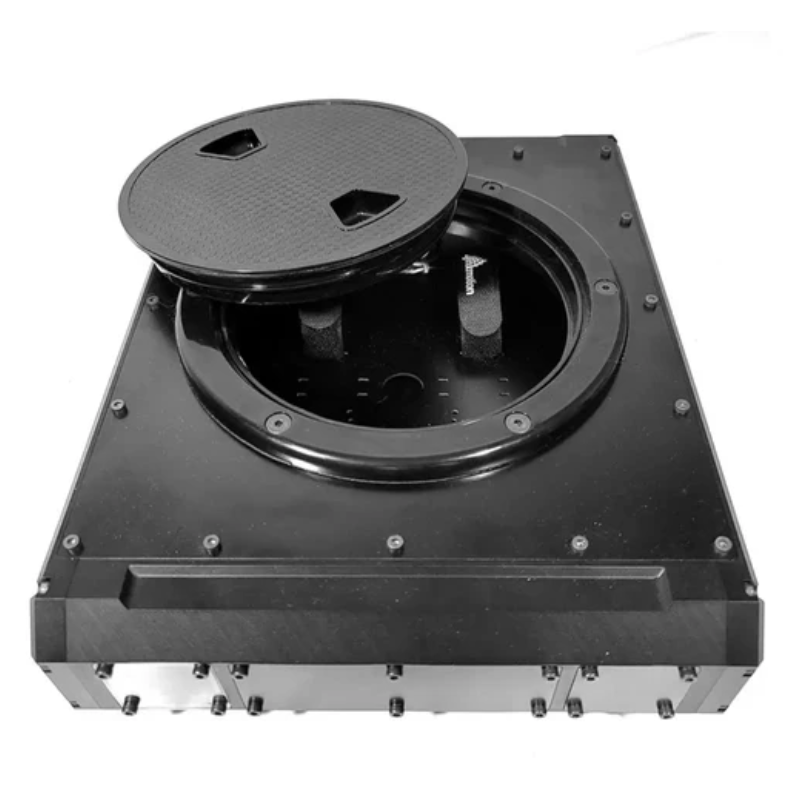
Lynxmotion - A4WD3 lid
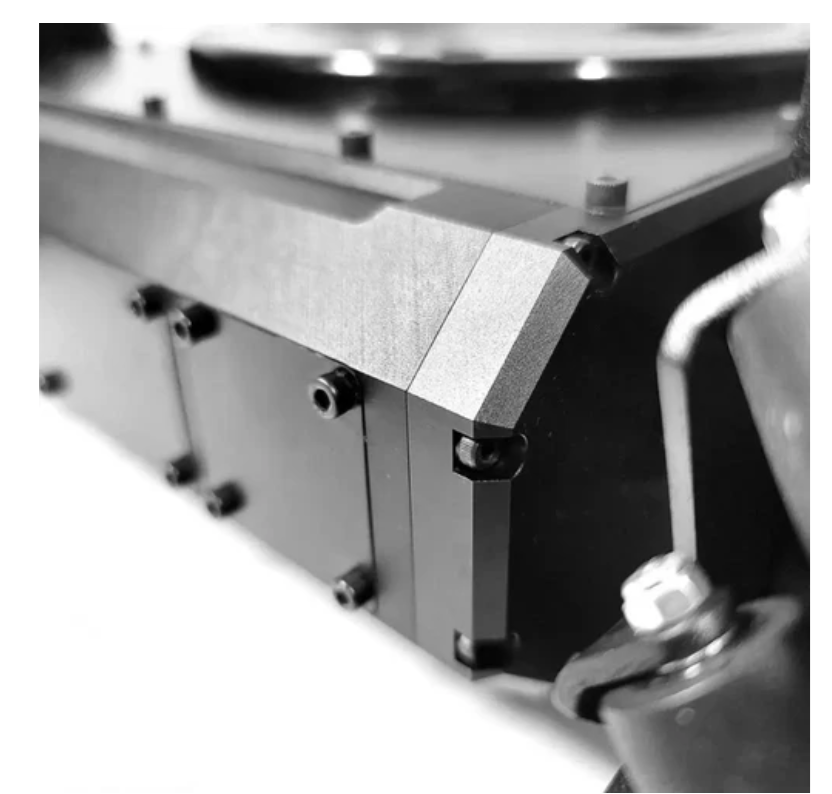
The machined aluminum frame integrates seals around each motor shaft, and there are solid rubber wires between the frame and all panel openings, making it dustproof and waterproof. There is a large ship inspection hatch on the roof for easy maintenance of internal parts and quick replacement or charging of batteries. Except for the internal electronic mounting board, the platform is symmetrical and can be inverted.
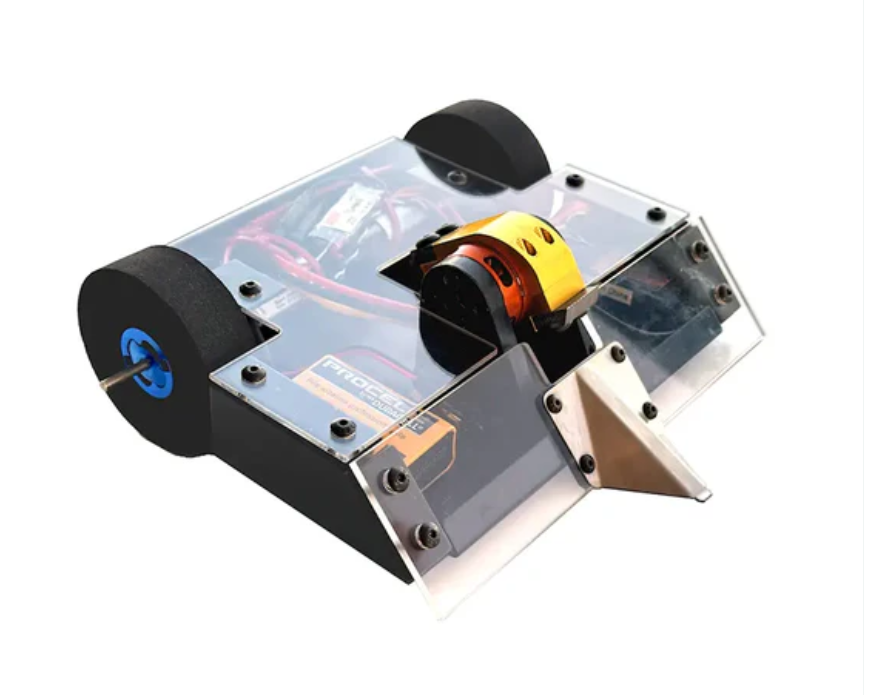
Lynxmotion - A4WD3 Mecanum Sport
The Mars rover uses four powerful 12V DC motors connected to 51:1 all metal planetary gears. Each motor is equipped with a magnetic encoder on the rear axle, which can provide 12 pulses per revolution (PPR).
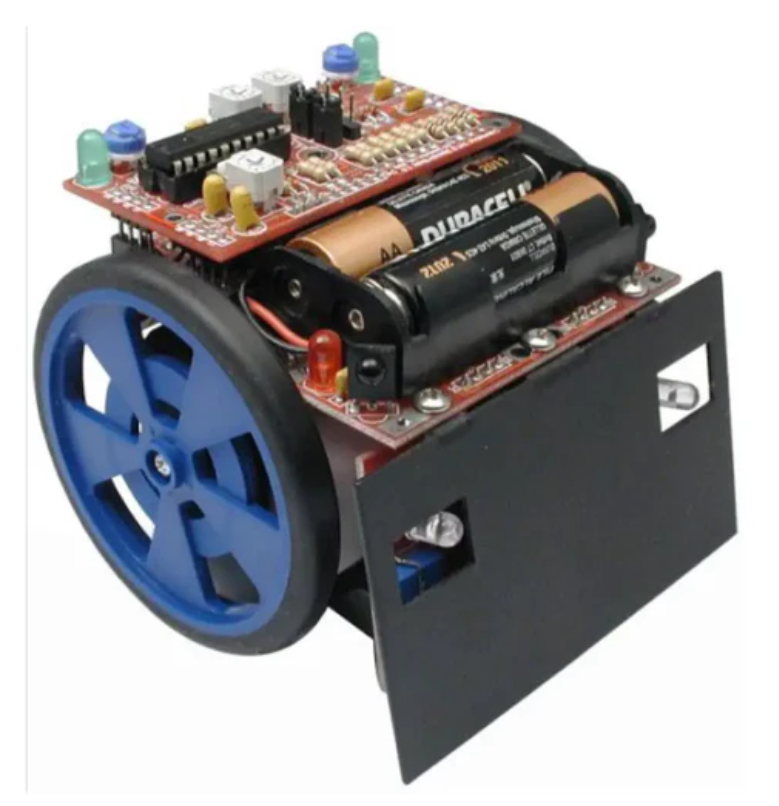
Lynxmotion-A4WD3 Mecanum View 2
The maintenance panel is made of G10 composite material, designed to allow users to add their own components through machined openings. It also includes transparent polycarbonate panels that allow for internal installation of cameras and/or LED lights to enhance visibility (Lynx Motion - A4WD3 red brake and white high-power LED module).
Attention: Ensure the correct installation of each pair of Mecanum wheels. For indoor use only.
application
Indoor all-round expansion platform
Warehouse Robot Experiment
Camera platform
Mecanum wheel
Outer diameter 152 millimeters (6 inches) x width 55.52 millimeters
15 38.1mm long rollers at a 45 degree angle
Body Material: Aluminum Alloy
Roller material: Nylon+TPR
Gasket material: Nylon
Two left-hand wheels and two right-hand wheels
Framework functionality
4 planetary gear DC motors (12V) with rear encoder
Processed aluminum frame with G10 composite panel
The shaft seal and solid rubber wire have waterproof and dustproof functions
Internal mounting boards for electronic devices and batteries
Related products



Hiwonder Tankbot tracked robot car with robotic arm, suitable for STM32 programming