
Lynxmotion Pete humanoid robot development platform (hardware only)
(0
reviews)
Sold by:
规划局
规划局
Price:
$344.18
/0.82
Refund:
Share:
Top Selling Products
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




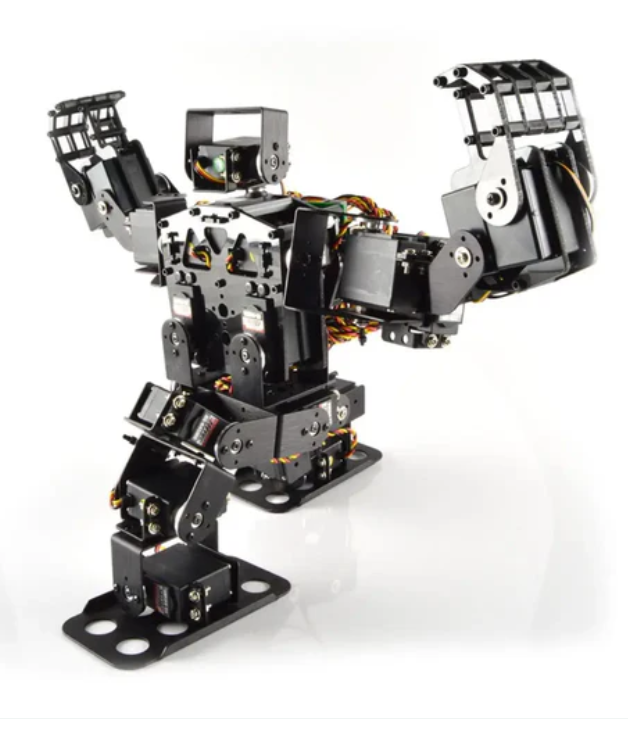
22 degree of freedom R/C servo bipedal walking machine with gripper
Each leg and arm has five degrees of freedom
All black aluminum bracket and black Lexan
Based on Servo Upright Machine (SES)
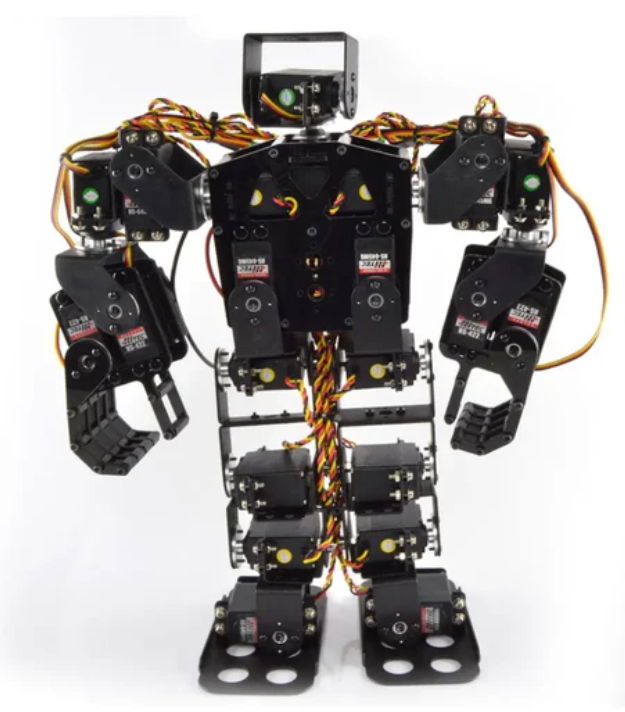
Lynxmotion Pete humanoid robot development platform (hardware only) is a 22 DoF R/C servo bipedal walker with a default configuration of gripper. This allows Pete to walk forward or backward, turning left or right in place at a variable speed. The leg design is similar to that of humans. Pete has five degrees of freedom for each leg, five degrees of freedom for each arm, and two degrees of freedom for the head. It is worth noting that Pete is currently a research platform that requires users to create their own walking algorithms and complete electronic devices to achieve remote control or autonomous functions.
Note: Only includes brackets and hardware; Excluding electronic devices or servers.
mechanical structure
The robot is made of a black anodized aluminum servo bracket and ultra sturdy laser cut Lexan structural components. Due to the fact that the kit is based on a servo upright machine kit (SES), these components can be easily used (in conjunction with some other components sold separately) to manufacture various other robots, such as quadrupeds, hexapods, robot arms, etc.
Related products









$149.99
Ainova Vision Robotic Car with Wondercam, Graphic Scratch and Python Programming
Club Point:
0
© Temu-2023