
Lynxmotion servo upright machine kit V1.1
规划局
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




Robot construction kit based on modular bracket
Build five different robots
Can be programmed in Arduino
Durable metal bracket
PS2/Bluetooth/Autonomous Control, etc!
Compatible with Lynx Motion FlowBotics Studio graphic programming software (download)
Regarding the servo upright machine kit V1.1
Consider the Lynx motion series servo bracket as a modular construction kit for servos. These components have extremely wide applications and can be used for almost any mechanical arrangement. You can now build custom robots according to your specifications! The aluminum bracket is made of black anodized aluminum, and when plastic is needed, the parts are made of durable black Lexan. Each degree of freedom ball bearing provides precise, low friction motion. The precise fit of pipes, hubs, and hub connectors truly expands the possibilities of construction. They are manufactured in the United States and made of high-quality aluminum alloy. Unlike LEGO Mindstorms and many other modular robot building kits, Lynx Motion Servo Installation Kit (SES) is close to custom robots as it allows you to integrate third-party sensors and products.
Programming!
The SES suite includes the new FlowBotics Studio (which itself includes the full version of the popular FlowStone software, worth $250!). Flowbotics Studio is an easy-to-use graphical Windows program that can be used to program and control anything you build without writing code. FlowBotics Studio interacts directly with the SSC-32U servo controller via Bluetooth (without the need for BotBoarduino), offloading all advanced mathematical operations to the computer. In addition, there are five visual representations of example robots that make servo positioning for each sequence easier.
How does it work?
You can build the entire component using only the bracket component, and then fill the component with a server. Use only two screws as the server horn, and four 3mm screws, washers, and nuts to secure the server body to the bracket, making the joint very durable and able to withstand heavy loads. This makes designing and building robust components surprisingly fast and easy. Replacing or swapping servers is effortless as the rest of the components do not need to be disassembled. Use FlowBotics Studio software to configure the server to position it correctly, and then observe the robot following in real-time as you drag each component on the screen! Load sample code to start and run the robot using the PS2 controller.
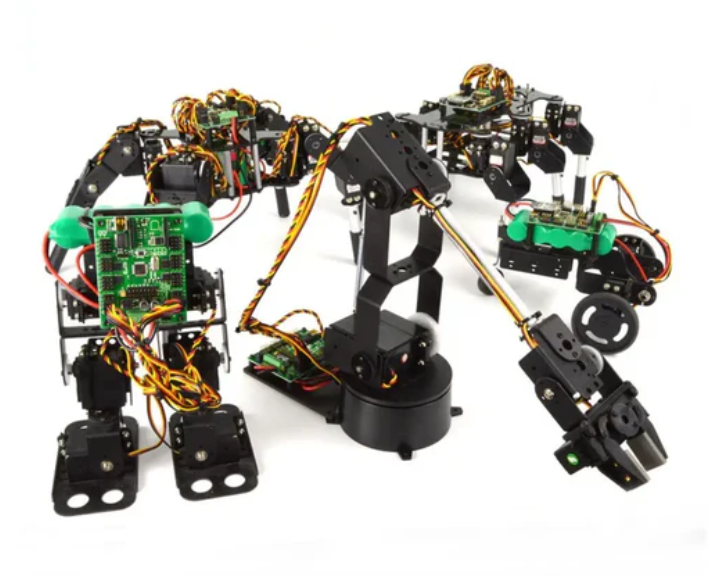
What can you do?
AL5D robotic arm
The AL5D robotic arm provides fast, accurate, and repeatable motion. The characteristics of the robot include base rotation, single plane shoulder, elbow, wrist movement, functional gripper, and optional wrist rotation. The AL5D robotic arm is an affordable system with a time tested design that is sturdy and durable. Everything needed to assemble and operate the robot is included in the kit, with accessories such as rotating wrists or vacuum clamps sold separately.
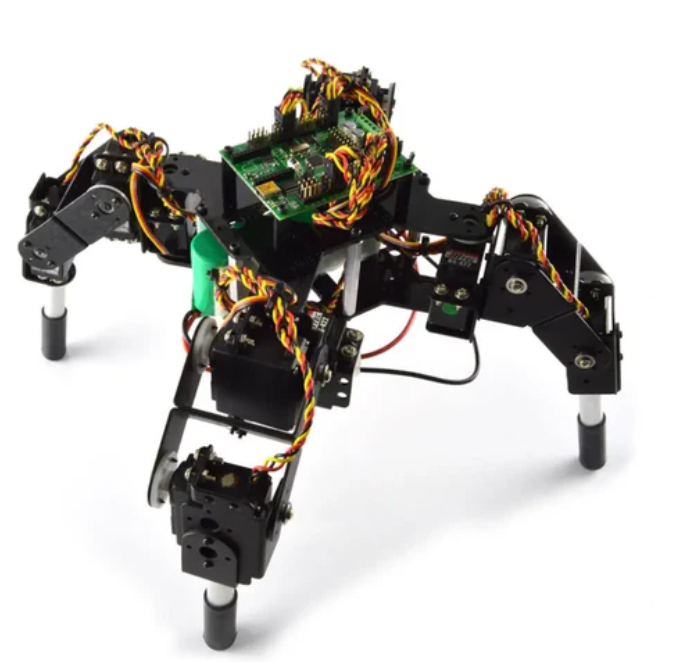
SQ3 symmetrical quadruped robot
SQ3 is a quadruped robot with 3 degrees of freedom per leg and a symmetrical body design. The symmetry of the robot makes it a very unique quadruped walking robot. The three degree of freedom leg design provides the flexibility needed to walk in any direction and roll the body! The robot uses eight HS-645MG servers and four HS-422 servers. The SES kit includes everything needed to make functional robots.
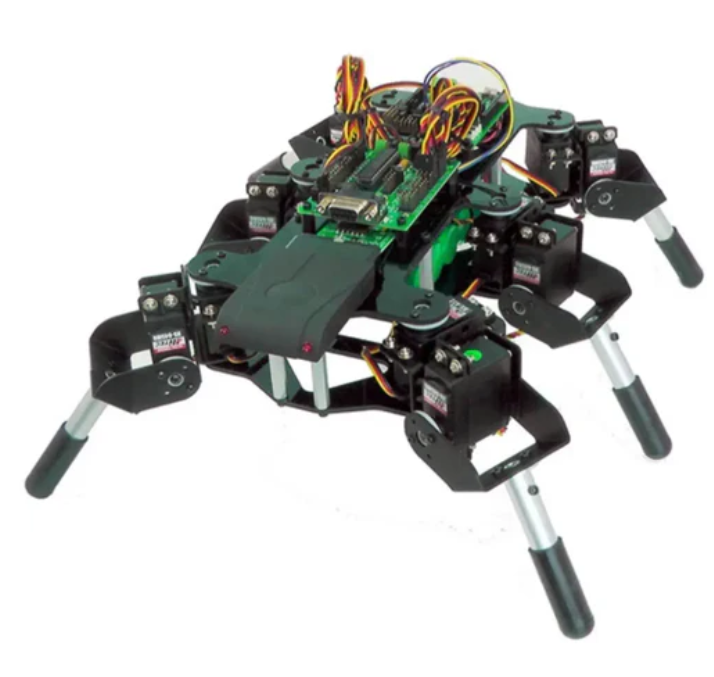
MH2 hexapod robot
The MH2 hexapod robot adopts a simple mechanical leg design and an all metal bracket. This leg design minimizes the number of parts required to manufacture two degrees of freedom (DOF) legs and allows the robot to operate like a tank. Supports forward, reverse, and in place rotation. The robot uses standard sized Hitec servers as legs. The combination kit includes everything needed to manufacture functional robots.
2WD1 Rover
The Lynxmotion aluminum 2WD servo robot kit is a sturdy, modifiable, and expandable chassis that can be used for your RC or autonomous robot experiments. By using plastic wheels with rubber rims, the robot has excellent traction. Using our small 6V NiMH battery pack and BotBoarduino means there is enough space to accommodate additional sensors and electronic devices. Add infrared distance sensors to the front or rear of the robot to perform basic obstacle detection.
BRAT walking robot
BRAT stands for bipedal robot articulated transportation. The robot is a 6-servo bipedal walker, with each leg having three degrees of freedom (DOF). The robot can walk forward or backward, and turn left or right in place at a variable speed. It can even perform many Robo One style acrobatic movements. Our combination kit includes everything needed to make an operable robot. Electronic devices are installed in the form of a backpack. Once you understand the principle, you can modify the legs to include additional degrees of freedom (such as hip rotation) or more complex movements.
Related products