

Newton ROV Sediment Sampler Accessories for Underwater Collection
(0
reviews)
Sold by:
举行活动
举行活动
Price:
$280.00
/0.5
Refund:
Share:
Top Selling Products
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




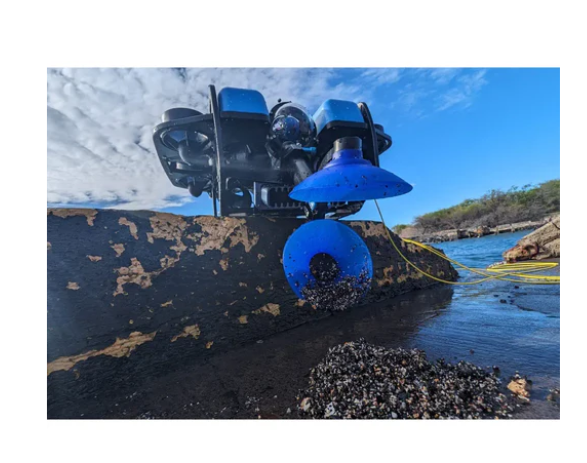
- Newton ROV Sediment Sampler Accessory for Underwater Collection
- ROV Modification for Sediment Collection
- Adopts standard rubber cups
- Quick-change design, strong adaptability
- Includes comprehensive user guide
- Made of durable materials
- The Newton ROV Underwater Collection Sediment Sampler Accessory is designed to transform your remotely operated vehicle (ROV) into an efficient sediment collection device for underwater exploration. The accessory features two arms that replace the standard jaws of the ROV clamp. The arms are equipped with rubber cups that fit the sediment sample well, allowing the material to be held securely even when larger objects are included in the sample. The rubber cups are designed to create a loose seal that helps retain the sediment as it rises to the surface.
- The process of converting from a standard clamp to a sediment sampler attachment is very simple and quick, allowing for flexible adaptation to the various purposes of each underwater mission. The accessory comes with a comprehensive guide that provides detailed installation and usage instructions, allowing users to effectively collect samples from the seabed.
- To ensure proper handling and safety during operation, accessories must be used in accordance with the instructions provided.
Related products









$149.99
Ainova Vision Robotic Car with Wondercam, Graphic Scratch and Python Programming
Club Point:
0
© Temu-2023